Lift-Equipped Mobile Manipulator
Isaac Lab shelf-transfer task with PPO training and success/failure analysis.

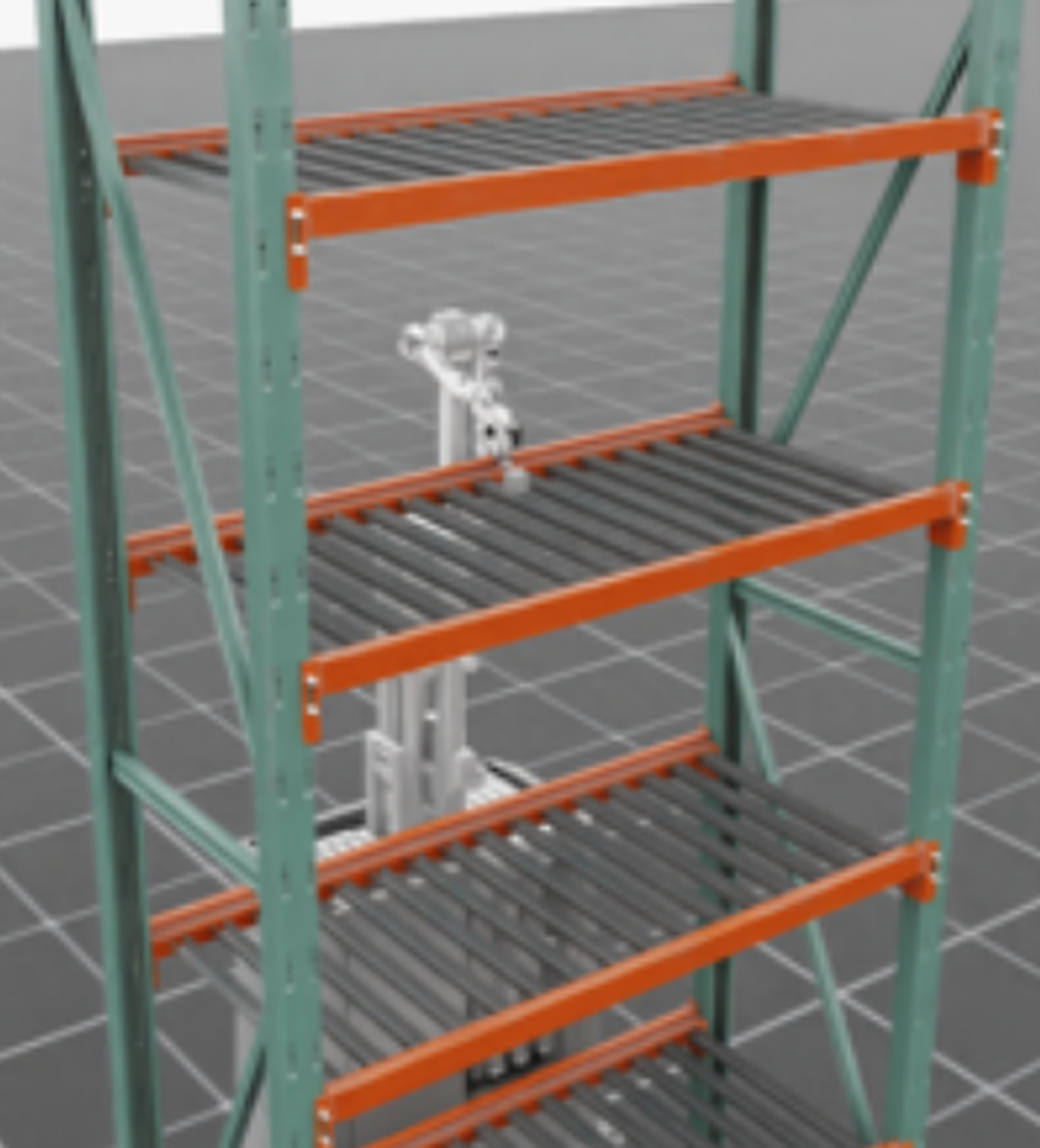
I designed a lift-equipped mobile manipulator platform for shelf transfer in multi-level rack environments and formulated an Isaac Lab PPO task with 9-D action / 41-D observation, staged reward terms, randomized source-object placement, and success/failure analysis.
- Role: platform design, 9-D action / 41-D observation Isaac Lab PPO environment, shelf-transfer experiment analysis
- Tools: Isaac Lab, PyTorch, PPO, task formulation
- Evaluation: 50 rollout trials with +/-3 cm source-object randomization.
- Result: 41/50 successful trials (82%); failures consisted of 3 grasp failures and 6 object-drop failures.
- Paper: A Lift-Equipped Mobile Manipulator Platform for Shelf Transfer in Multi-Level Rack Environments. IEEE/ASME AIM 2026, accepted.
- Code: GitHub link planned with paper release.