LiDAR-Based Campus Autonomous Driving
RTK-surveyed HD map, Autoware waypoint driving, and pedestrian tests.




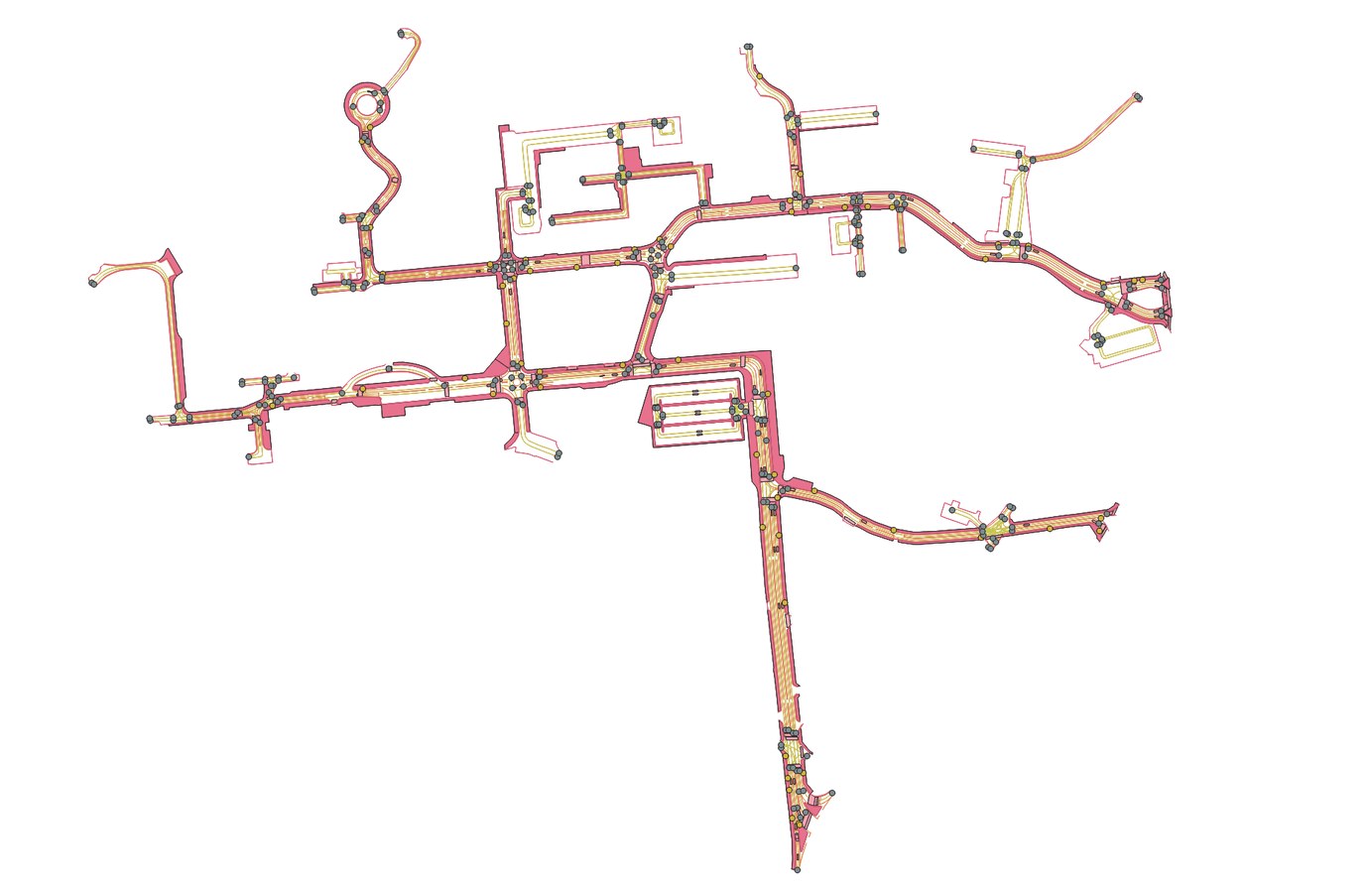

I built an RTK-surveyed campus HD map, set up in-vehicle computing, and implemented Autoware waypoint driving on a Hyundai Sonata test vehicle. I also tested LiDAR-based pedestrian detection/avoidance during campus driving experiments.
- Role: RTK-surveyed HD mapping, Autoware waypoint driving, in-vehicle setup, LiDAR pedestrian-detection testing
- Tools: Autoware, LiDAR mapping, RTK surveying, waypoint driving, pedestrian detection
- Result: the same software base was later used in autonomous road-sweeping vehicle development.