KALO: Kangaroo-LocoManipulation
Constrained arm motion for early-launch behavior on a Go2W-OpenArm platform.


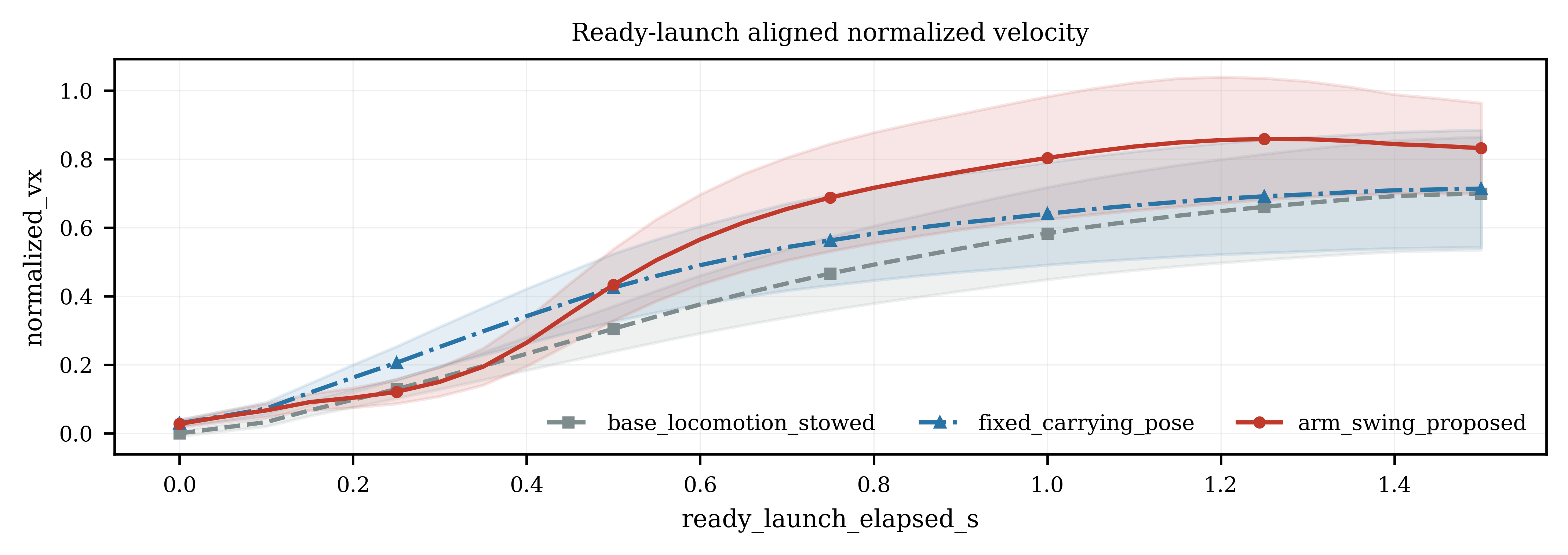
I studied constrained arm motion for early-launch behavior in a Go2W-OpenArm wheeled-legged platform. The project evaluated whether manipulator-induced inertial effects can improve initial acceleration under controlled Isaac Lab/RSL-RL simulation settings.
- Role: launch-assist concept, Go2W-OpenArm setup, evaluation metrics, Isaac Lab/RSL-RL experiments
- Tools: Isaac Lab, RSL-RL, PyTorch, PPO, Go2W-OpenArm
- Result: normalized forward-velocity AUC(0-1.5 s) increased by 15.1% over Fixed (0.726 -> 0.835); t90 decreased from 1.703 s to 1.067 s; 90%-target-speed trials within 1.5 s increased from 29/128 to 69/128.
- Paper: KALO: Kangaroo-LocoManipulation for Early Launch Acceleration in a Wheel-Legged Robot. IEEE/ASME AIM 2026, accepted.
- Code: kelvin926/KALO