CEBO-Based Stair-Climbing Wheel Design
CoppeliaSim evaluation-loop automation for T-pedal wheel design.
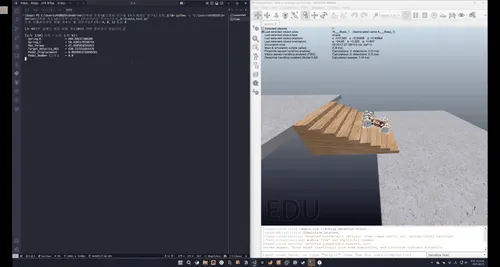
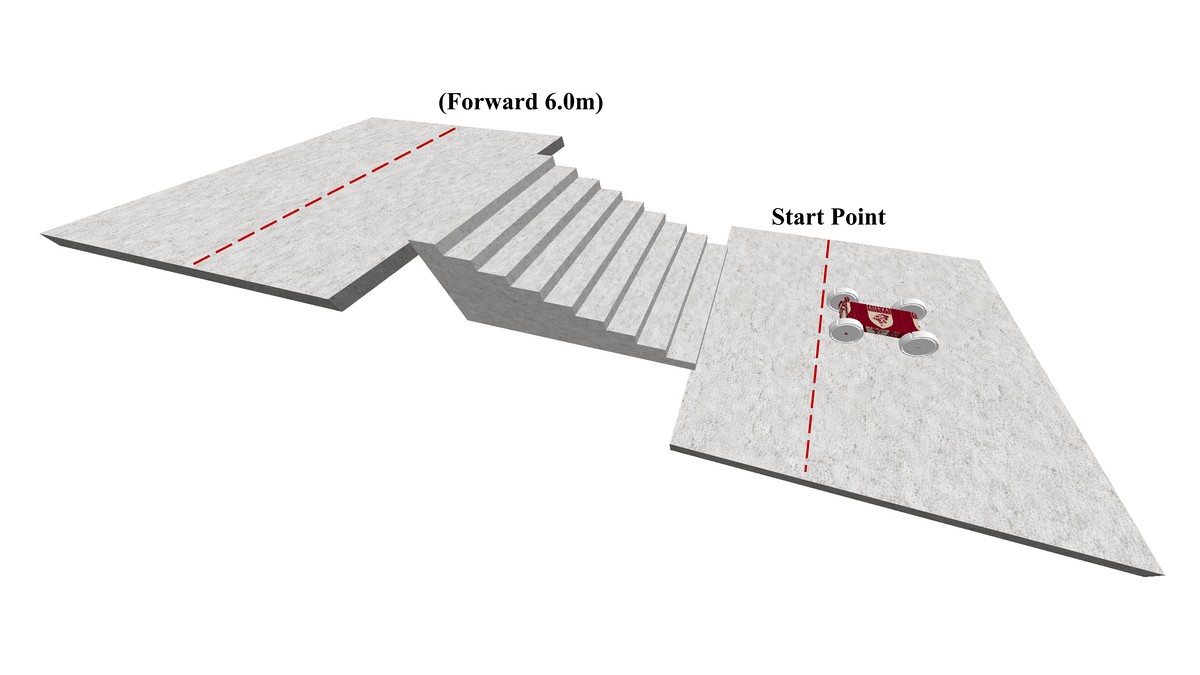

I formulated a six-variable T-pedal wheel design problem for stair-climbing performance and pitch stability. I automated the CoppeliaSim evaluation loop and analyzed stair-climbing performance and pitch-stability metrics under different wheel design and control parameters.
- Role: T-pedal wheel search-space design, CEBO optimization experiments, CoppeliaSim evaluation-loop automation
- Tools: Bayesian optimization, CoppeliaSim, Python
- Result: nominal traversal time decreased by 23.31% (9.405 s -> 7.213 s), and body-pitch stability median decreased by 37.84% (1.102 deg -> 0.685 deg) under the nominal friction condition.
- Paper: Clustering-enhanced Bayesian optimization (CEBO): A case study on T-pedal wheel design of a stair-climbing robot. Advanced Engineering Informatics, revised manuscript resubmitted after minor revision.
- Code: kelvin926/T-Pedal-with-CEBO