On-Campus Autonomous Mobile Robot Systems
ROS/Autoware integration, LiDAR mapping, detection/tracking, and validation.

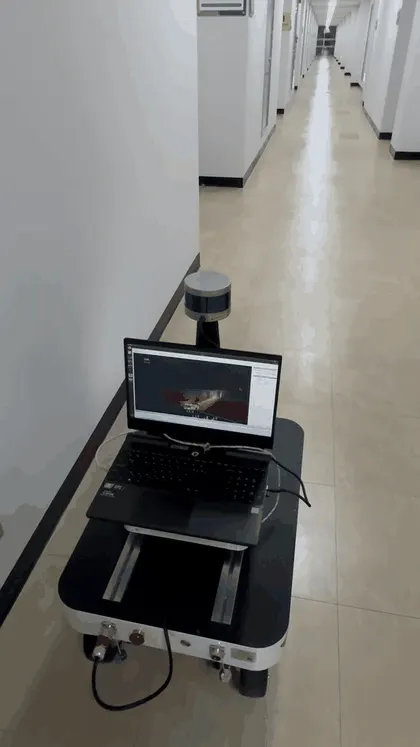

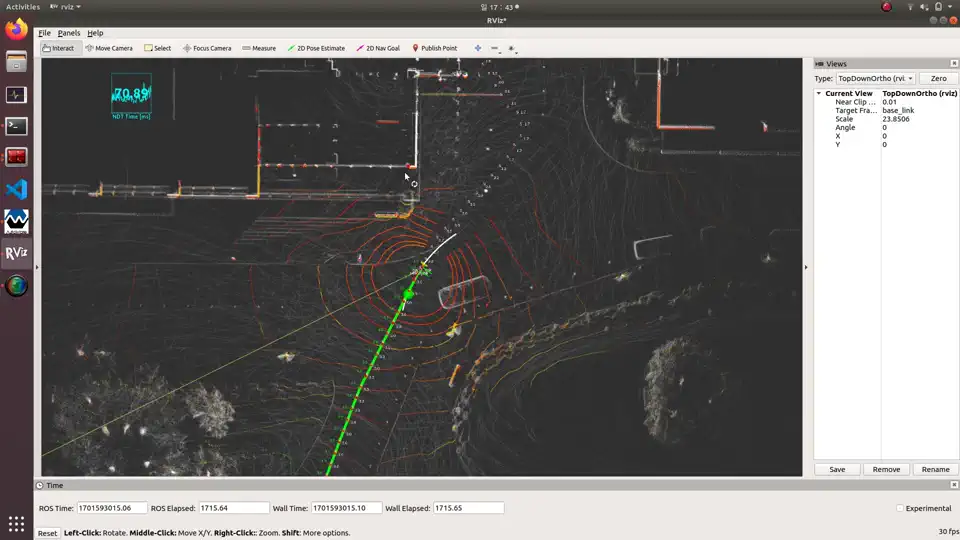

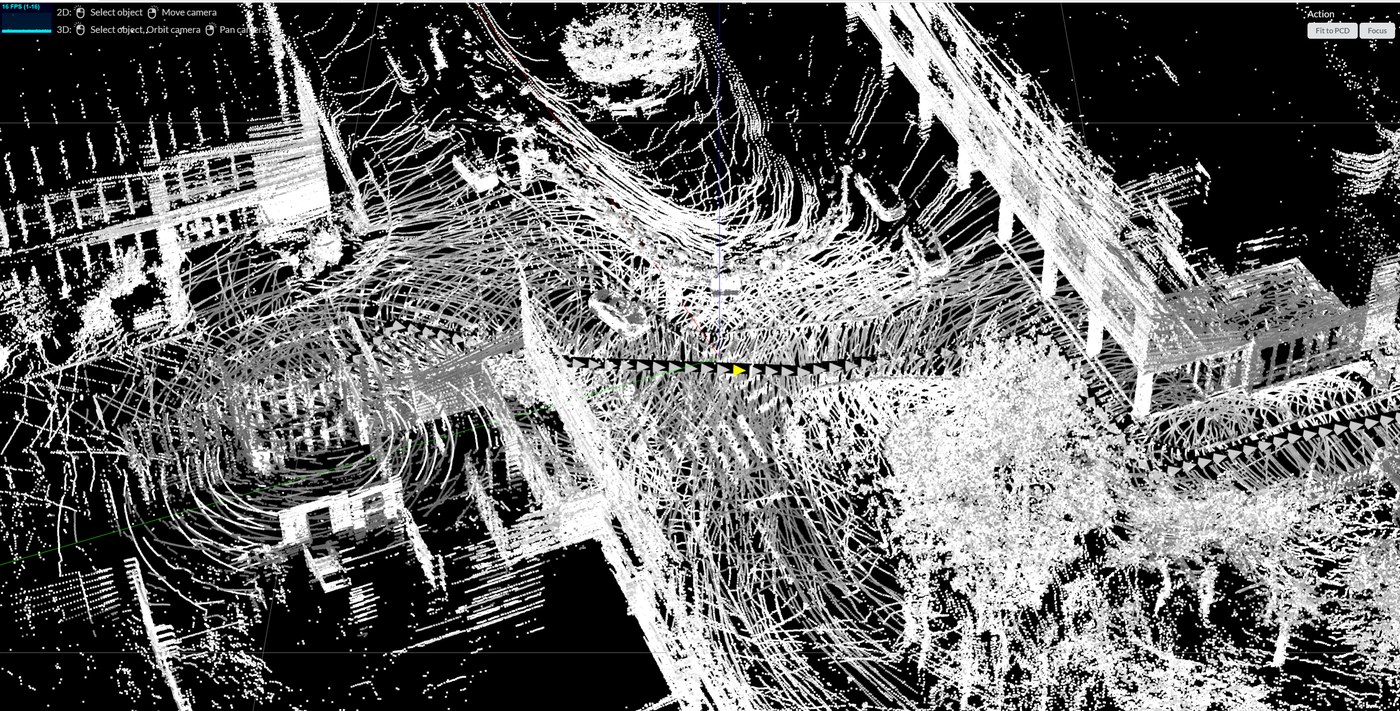
I built Ranger Mini v2 AMR and 1/5-scale autonomous-vehicle test setups for indoor delivery and perception/navigation practice. The work integrated ROS/Autoware, LiDAR-only mapping, DBSCAN/Kalman-filter tracking, YOLO-based avoidance tests, and campus-scale driving experiments for AMR/autonomous-vehicle systems.
- Role: platform bring-up, CAN/ROS/Autoware integration, LiDAR perception, navigation testing, small-platform setup
- Tools: ROS2, ROS, Autoware, CAN, LiDAR mapping, DBSCAN, Kalman filtering, object detection/tracking
- Result: Grand Prize, 2023 Korea University Project Semester; this work also supported the Electronics (2025) indoor delivery path-planning paper and the Sensors (2025) human-shared collision-detection paper.
- Related papers: Efficient Graph-Based Multi-Story Path Planning with Optimized Elevator Selection for Indoor Delivery Robots; Time-Interval-Based Collision Detection for 4WIS Mobile Robots in Human-Shared Indoor Environments.
Additional platform and mapping views